// Selected Work
Projects
Projekte
technology projects — coding, robotics and engineering.
Technologieprojekte — Coding, Robotik und Engineering.
2026
Building my own Shell in C
Programmierung einer Shell in C
Implementing a fully functional Linux shell with piping, redirection, autocompletion and persistent history.
Implementierung einer vollständig funktionsfähigen Linux-Shell mit Pipes, Umleitung, Autovervollständigung und persistenter History.
2025
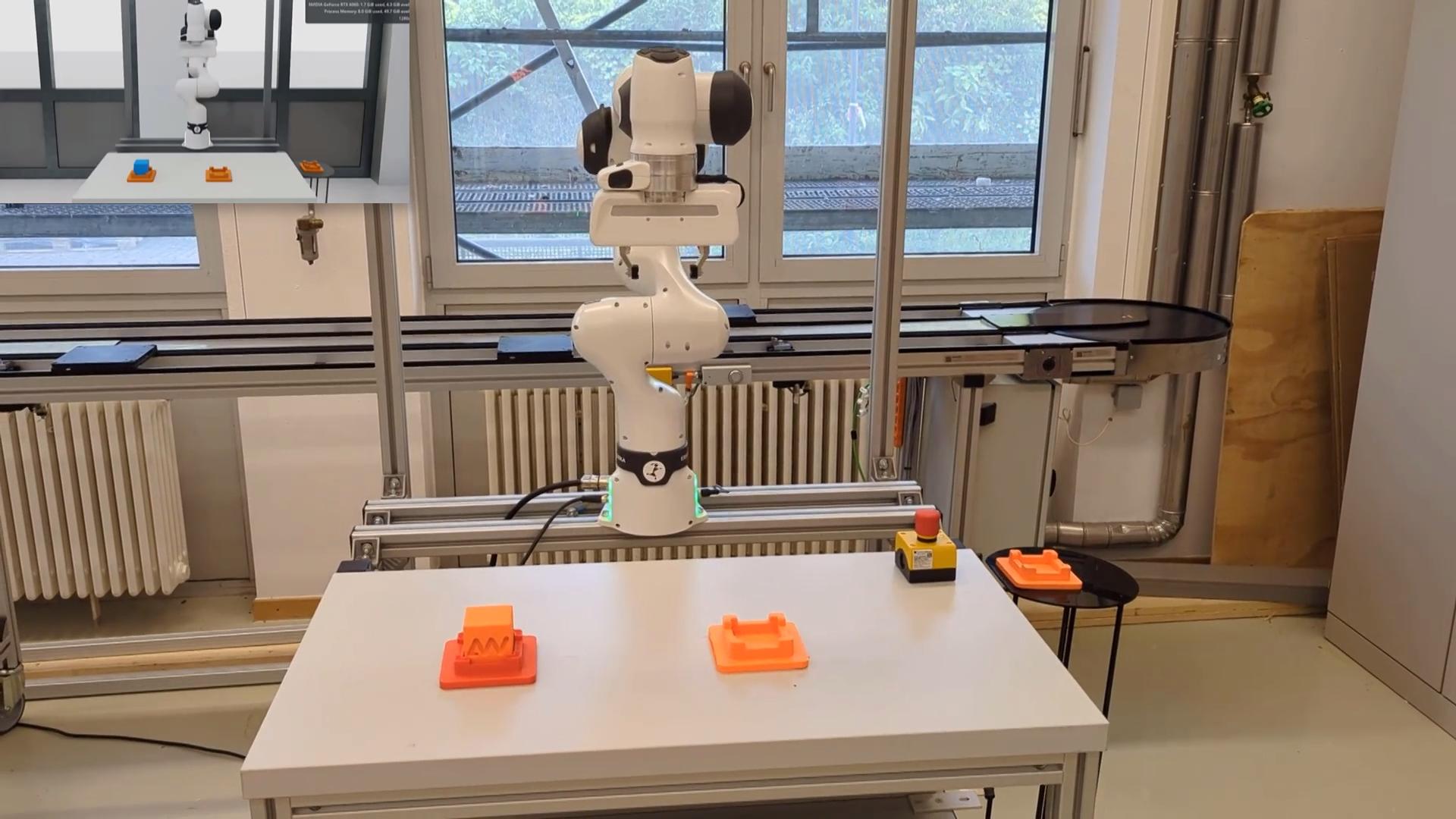
Robot Operating System 2 in Smart Factories
Robot Operating System 2 in der Smart Factory
Robot Operating System in Smart Factories – Development and Implementation of a Use Case using ROS2
Einsatz von ROS2 in der Smart Factory anhand eines Anwendungsbeispiels